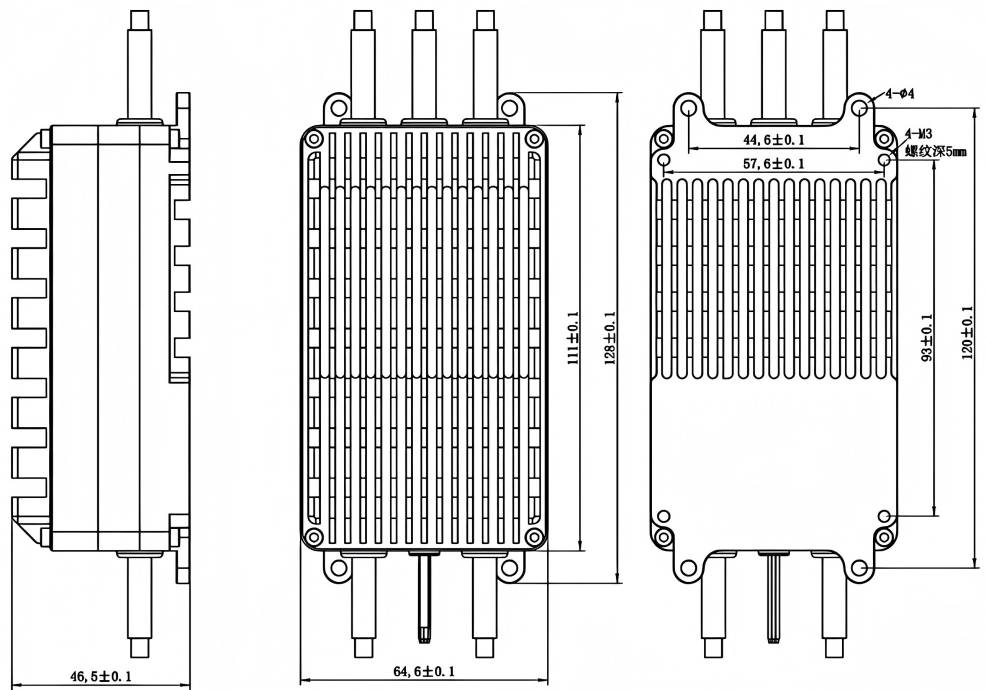
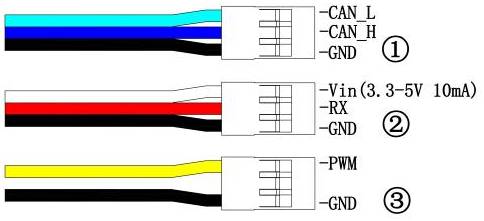
ROCK 400A-M CAN 隔离CAN总线PWM+CAN工业级专业程序,安全可靠高可靠启动算法,无惧逆风启动剧变油门抗丢相,快速油门响应,降低坠机风险高度智能化,自适应工作参数安全匹配规格:400A 6~14S零售价:¥4999 产品特点 多重保护安全:低压保护、高压保护、启动保护、堵转保护、过温保护、过流保护、过载保护、失控保护 可软件设置旋转方向 优质元器件,性能可靠低内阻MOS,瞬时耐流强 串口输出实时数据:电源电压、电机转速、电流、电调温度及调试数据等 屏蔽信号线降低干扰 光电隔离的信号输入、输出接口隔离干扰 防水等级:IP55/可定制IP68 轻量化设计,简单易用,稳定可靠,抗干扰能力强,调速性能良好 保护功能 低压保护:默认关闭(可定制开启)。高压保护:电源电压超过允许值时禁止电机启动。启动保护:启动不成功,限制启动电流,自动重新启动。堵转保护:正常运转中发生堵转(一般为外力所致)尝试重新启动(注意高油门时发生堵转可能损坏电调)。过温保护:温度超过120°C,最大输出功率缓慢降低,最多可降至满油门功率40%,温度降低后恢复原功率。过流保护:限制峰值电流不超极限值。过载保护:当识别到电机负载过重时,会限制最大油门以保护动力系统。失控保护:丢失信号200ms后逐渐降低输出功率,在1~2秒内为快速降低油门到50%以下,然后缓慢降低油门至停机。 技术参数 型号:ROCK 400A -M CAN 支持锂电:6~14S(高于65V禁止启动)持续工作电流: 260A(特定散热条件)瞬时工作电流(1秒):500A最大工作电流(3秒):400A产品尺寸:128*64.6*46.5mm电调重量:574g待机功耗:≤10mA@60V防水等级:IP55油门行程范围:1000~2000us(默认值)油门刷新率:50~500Hz(建议100~400Hz)油门响应时间:300ms(默认值,可定制) 电源线:硅胶线-红色/黑色-8AWG-150mm输出相线:硅胶线-黑色-8AWG-100mm信号线:UL1533-24AWG-灰色-540mm数据反馈线:PVC排线-30芯—黑红白-70mm外壳材质:航空铝合金,表面阳极氧化处理BEC输出:无输入信号电平:3.3~5V温度保护点:120℃运行环境温度:-20~+65℃通讯方式:PWM/CAN保存温度:-10~+40℃ 油门响应时间:电调接收到10%~100% 阶跃油门时,油门在规定时间内达到最大值,但通常电机转速滞后油门100~150ms。可根据客户需要定制性能参数,包括但不限于保护温度,响应时间等。 负载测试 测试条件:环境温度25℃,电源电压48V,数据仅供参考 负载电流100A,外壳无遮盖、正面风速19.0m/s散热条件下,起始温度29℃,经7分钟测试,工作正常,MOS温度50℃负载电流100A,置于纸盒(20*19*5cm)无风散热条件下,起始温度24℃,经7分钟测试,工作正常,MOS温度72℃ * 特定散热条件(低环境温度,吹风,辅助散热面,反馈MOS温度低于120℃),可以持续运行260A,持续高温工作会降低电调使用寿命,建议实际应用中,保持反馈MOS温度在105℃以下。 工程图 用户手册文档: CKESC-UAVCAN通讯协议 ROCK 400A-M CAN规格书 ROCK CAN系列使用说明书 感谢您使用本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。为此,我们强烈建议您在使用设备前仔细阅读本说明书,我们不承担因使用本产品而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任;同时,我们不承担因擅自对产品进行修改和错误使用所引起的任何责任。 我们有权在不经通知的情况下变更产品设计、外观、性能及使用要求。 接口定义 接口①:浅蓝色:CAN_L深蓝色:CAN_H黑 色 : GND-隔离参考地接口②:白色:输入电压 3.3-5V,电流≤5mA,仅供串口数据输出端口使用。红色:输出电调的实时工作状态信息,电平由隔离供电电压决定。黑色 : GND-隔离参考地。接口③:黄 色:PWM/TTL-RX,接收 PWM,1000-2000us(可校准),50-400Hz,3.3-5V 电平。黑 色 : GND-隔离参考地 数据输出 数据输出采用3线制UART-TTL,波特率38400bps,字符方式。数据包格式:SPD:XXXX TMOS:XXXX TMOT:XXXXTMCX:XXXXXXXXXXXXXXXXXX CURI:XXXX VOLT: XXXX PWAC:XXXXX SYS:XXXXXXXXXXXX DBG:XXXXXXXXXXXX其中:SPD:XXXX 电机转速(RPM,误差±12RPM,按电机极数42P换算得出)TMOS:XXXX 电调温度(°C,误差±1°C)TMOT:XXXX 电机温度(°C,误差±1°C,保留数据)TMCX: XXXXXXXXXXXX (调试数据)CURI:XXXX 电机电流(X0.01A,误差±10%,主要用于电调的过流保护)VOLT:XXXX 电源电压(X0.01V,误差±0.5V)PWAC: XXXX (调试数据)SYS:XXXXXXXXXXXX (调试数据)DBG:XXXXXXXXXXXXX :(调试数据) 关于模式 默认模式:PWM+CAN(电调能在 PWM 模式或 CAN 模式下使用)①默认模式下,若使用PWM 信号进行控制,首次使用、更换遥控器(油门信号发送设备)前必须校准油门行程。 校准方式:将油门信号调至最大值,接通电源将启动油门校正,3s 后电机将发出“ ♪123 3—3-3-3” 之后 立即将油门信号调至最小值,电机将发出音乐“ ♪3-3-5-4” ,音乐声结束后,油门行程校正完成。②默认模式下,若使用 CAN 信号进行控制,电调控制指令详见“CKESC-UAVCAN2.1”协议。 安全告知 信号脉冲宽度,频率必须符合要求。不要拉拽和带电插拨控制信号线,确保电调信号线连接可靠无松动,以防产生干扰信号导致控制异常。电源连接可以使用防打火插头,但要确保连接可靠(连接不良会导致插头烧蚀,甚至电源故障);输出相线不要使用防打火插头,不要带电插拔。确保电源电压稳定(如果是电池供电,注意电池放电倍率要高,低温放电性能要好),否则有可能导致电调损坏。保证电调散热良好,电调长期工作于高温状态会加速元器件的老化,大幅减少电调使用寿命。电调余电未放尽前禁止输出相线短路,可能引起电调损坏。本产品应用于飞行器时,需注意如下事项:① 请使用合理配置搭配电调,以获得最佳性能(力效,功率,安全性)。若采用不匹配的电机、螺旋桨(甚至不是螺旋桨负载或变化负载)或非正确的电压,可能达不到最优性能,甚至损坏电调。② 每次飞行前建议检查飞行器各部分结构是否有松动、老化或损坏等情况,机臂和螺旋桨固定螺丝必须锁紧牢固。③ 务必使用稳定负载,螺旋桨被外部堵转时应尽快关闭油门或断电,防止堵转电流过大而损坏电调。严禁超载使用,否则产品性能和安全将无法得到保证。请勿擅自拆解改装产品,否则无法保证使用性能与安全及保修服务。