




ROCK 280A-M CAN
- Isolate the CAN bus
- PWM+CAN
- Industrial-grade professional procedures, safe and reliable
- Highly reliable start algorithm, no fear of headwind starting
- The throttle is anti-phase loss and fast throttle response to reduce the risk of crashes
- Highly intelligent, adaptive working parameters
- Secure matching
- Specification: 280A 6~14S
- Retail Price: ¥3799
Features
- Multiple protection safety: low voltage protection, high voltage protection, start protection, locked-rotor protection, over-temperature protection, over-current protection, overload protection, runaway protection
- The direction of rotation can be set by software
- High-quality components, reliable performance, low internal resistance, MOS, instantaneous current resistance
- The serial port outputs real-time data such as power supply voltage, motor speed, current, ESC temperature and debugging data.
- Shielding signal lines reduces interference
- Optoelectronic isolation signal input and output interfaces isolate interference
- Waterproof Rating: IP55 / Customizable IP68
- Lightweight design, simple and easy to use, stable and reliable, strong anti-interference ability, good speed regulation performance
protective function
- Low voltage protection: off by default (can be customized on).
- High voltage protection: prohibit the motor from starting when the power supply voltage exceeds the allowable value.
- Startup protection: If the startup is unsuccessful, the startup current will be limited, and the startup will be restarted automatically.
- Stall protection: If a stall occurs during normal operation (usually caused by external force), try to restart (note that the stall may damage the ESC when the throtor is high).
- Over-temperature protection: When the temperature exceeds 120°C, the maximum output power will be reduced slowly, up to 40% of the full throttle power, and the original power will be restored after the temperature is reduced.
- Over-current protection: limit the peak current and do not exceed the limit value.
- Overload Protection: When an overload is identified on the motor, the maximum throttle is limited to protect the powertrain.
- Loss of control protection: 200ms after the loss of signal gradually reduce the output power, in 1~2 seconds for rapid throttle reduction to less than 50%, and then slowly reduce the throttle to stop.
Technical parameters
Model:ROCK 280A -M CAN
Lithium support:6~14S (higher than 65V prohibits startup)
Continuous operating current: 220A (specific heat sink conditions)
Instantaneous operating current (1 sec.):320A
Maximum operating current (3 seconds):280A
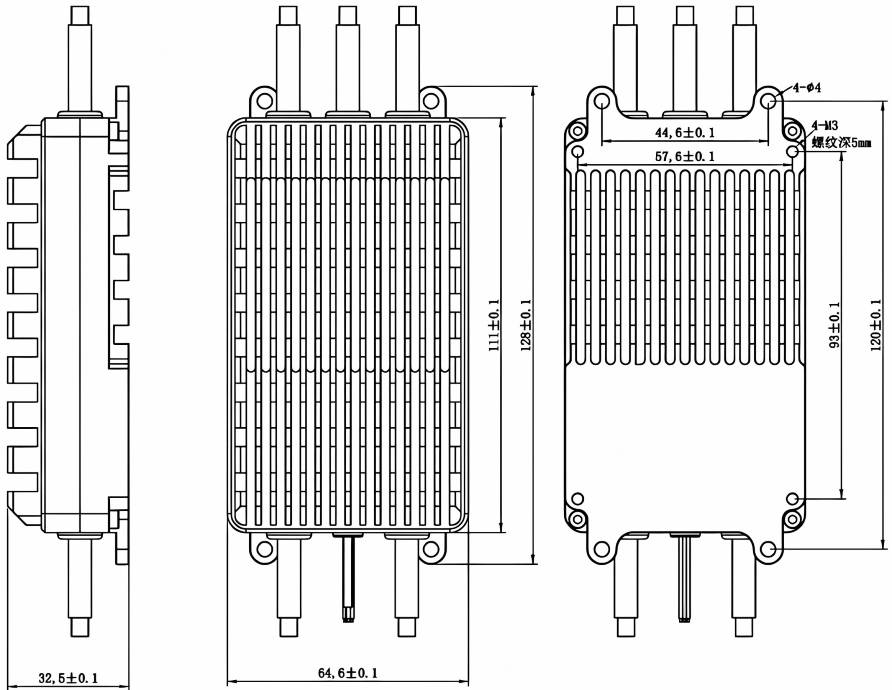
Product Dimensions:128*64.6*32.5mm
ESC Weight:370g
Standby power consumption:≤10mA@60V
Waterproof rating:IP55
Throttle travel range:1000~2000us(Default)
Throttle Refresh Rate:50~500Hz (100~400Hz recommended)
Throttle response time:300ms (default, customizable)
Power Cord:Silicone Wire-Red/Black-8AWG-150mm
Output phase lines:Silicone Wire-Black-8AWG-100mm
Signal wire:UL1533-24AWG-Gray-530mm
Data Feedback Line:PVC cable - 30 cores - black, red and white - 70mm
Shell material:Aviation aluminum alloy with anodized surface
BEC Output:not
Input signal level:3.3~5V
Temperature protection points:120℃
Operating ambient temperature:-20~+65℃
Communication methods:PWM/CAN
Preservation Temperature:-10~+40℃
- Throttle Response Time: When the ESC receives 10%~100% step throttle, the throttle reaches the maximum value within the specified time, but usually the motor speed lags the throttle by 100~150ms.
- Performance parameters can be customized according to customer needs, including but not limited to protection temperature, response time, etc.
load test
Test conditions: ambient temperature 25℃, power supply voltage 48V, data for reference only
- Load current 100A, shell without cover, frontal wind speed 19.0m/s cooling conditions, the starting temperature of 28 ℃, after 7 minutes of testing, the work is normal, the MOS temperature of 67 ℃
- Load current 100A, placed in a cardboard box (20*19*5cm) under the condition of no air cooling, the starting temperature 28 ℃, after 7 minutes of testing, the work is normal, MOS temperature 112 ℃.
* Specific heat dissipation conditions (low ambient temperature, blowing air, auxiliary heat dissipation surface, feedback MOS temperature below 120℃), can run 220A continuously, continuous high temperature work will reduce the service life of the ESC, it is recommended to keep the feedback MOS temperature below 105℃ in practical applications.
Drawings
ROCK CAN Series Instruction Manual
Thank you for using this product! Brushless power systems are powerful and incorrect use may result in personal injury and equipment damage. For this reason, we strongly recommend that you read this manual carefully before using the equipment. We do not assume any liability arising from the use of this product, including, but not limited to, liability for incidental or consequential damages; at the same time, we do not assume any liability arising from unauthorized modifications to the product and misuse.
Translated with DeepL.com (free version)
We reserve the right to change product design, appearance, performance and usage requirements without notice.
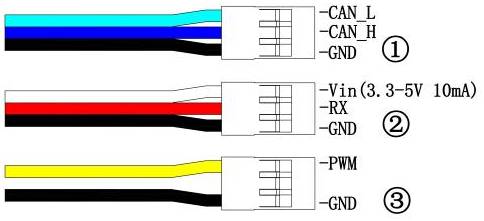
Interface definition
Interface ①.
Light blue: CAN_L
Dark blue: CAN_H
Black : GND-Isolated Reference Ground
Interface ②.
White: Input voltage 3.3-5V, current ≤5mA, for serial data output port only.
Red: outputs real-time operating status information of the ESC, the level is determined by the isolated supply voltage.
Black : GND-Isolated reference ground.
Interface ③.
Yellow: PWM/TTL-RX, Receive PWM, 1000-2000us (calibratable), 50-400Hz, 3.3-5V level.
Black : GND-Isolated Reference Ground
Data output
- Data output adopts 3-wire UART-TTL, baud rate 38400bps, character mode.
- Packet format:SPD:XXXX TMOS:XXXX TMOT:XXXXTMCX:XXXXXXXXXXXXXXXXXX CURI:XXXX VOLT: XXXX PWAC:XXXXX SYS:XXXXXXXXXXXX DBG:XXXXXXXXXXXX
Of which.
SPD:XXXX Motor speed (RPM, error ±12RPM, converted according to the number of motor poles 42P)
TMOS:XXXX ESC temperature (°C, error ±1°C)
TMOT:XXXX Motor temperature (°C, error ±1°C, data retained)
TMCX: XXXXXXXXXXXX (debugging data)
CURI:XXXX Motor current (X0.01A, error ±10%, mainly used for ESC overcurrent protection)
VOLT:XXXX Power supply voltage (X0.01V, error ±0.5V)
PWAC: XXXX (debugging data)
SYS:XXXXXXXXXXXX (debugging data)
DBG:XXXXXXXXXXXXX : (debugging data)
About the model
- Default mode: PWM+CAN (ESC can be used in PWM mode or CAN mode)
①In default mode, if PWM signal is used for control, the throttle travel must be calibrated before first use or replacement of remote control (throttle signal sending device). Calibration mode: Set the throttle signal to the maximum value, turn on the power to start the throttle calibration, after 3s, the motor will emit “♪123 3-3-3-3” After that, immediately set the throttle signal to the minimum value, the motor will emit the music “♪3-3-5-4”, after the music is finished, the throttle travel calibration is completed. The motor will emit music “ ♪3-3-5-4 ”, after the music is finished, the throttle stroke correction is completed.
②In default mode, if CAN signal is used for control, the ESC control commands are detailed in the “CKESC-UAVCAN2.1” protocol.
Safety Notice
- Signal pulse width and frequency must meet the requirements. Don't pull and drag the control signal line, make sure the ESC signal line is connected reliably without loosening, in order to prevent the generation of interference signals leading to abnormal control.
- The power supply connection can use anti-ignition plug, but make sure the connection is reliable (poor connection will lead to plug ablation and even power failure); do not use anti-ignition plug for the output phase line, and do not plug or unplug it with electricity. Make sure the power supply voltage is stable (if it is battery powered, pay attention to the battery discharge multiplier should be high and the low temperature discharge performance should be good), otherwise it may lead to ESC damage.
- Ensure that the ESC heat dissipation is good, ESC long-term work in the high temperature state will accelerate the aging of components, significantly reducing the service life of the ESC.
- Do not short-circuit the output phase line before the residual power of the ESC is exhausted, which may cause damage to the ESC.
- When this product is applied to aircraft, the following matters should be noted:
① Please use a reasonable configuration with the ESC to get the best performance (force efficiency, power, safety). If you use mismatched motors, propellers (not even propeller loads or variable loads) or non-correct voltages, you may not achieve optimal performance or even damage the ESC.
② Before each flight it is recommended to check all parts of the aircraft structure for looseness, deterioration or damage, etc. The arm and propeller fixing screws must be locked firmly.
③ Be sure to use a stable load, when the propeller is blocked externally, the throttle should be closed or the power should be cut off as soon as possible to prevent the ESC from being damaged by excessive blocking current. - It is strictly forbidden to overload the product, otherwise the performance and safety of the product cannot be guaranteed.
- Please do not disassemble and modify the product without authorization, otherwise the performance and safety of use and warranty service cannot be guaranteed.